")

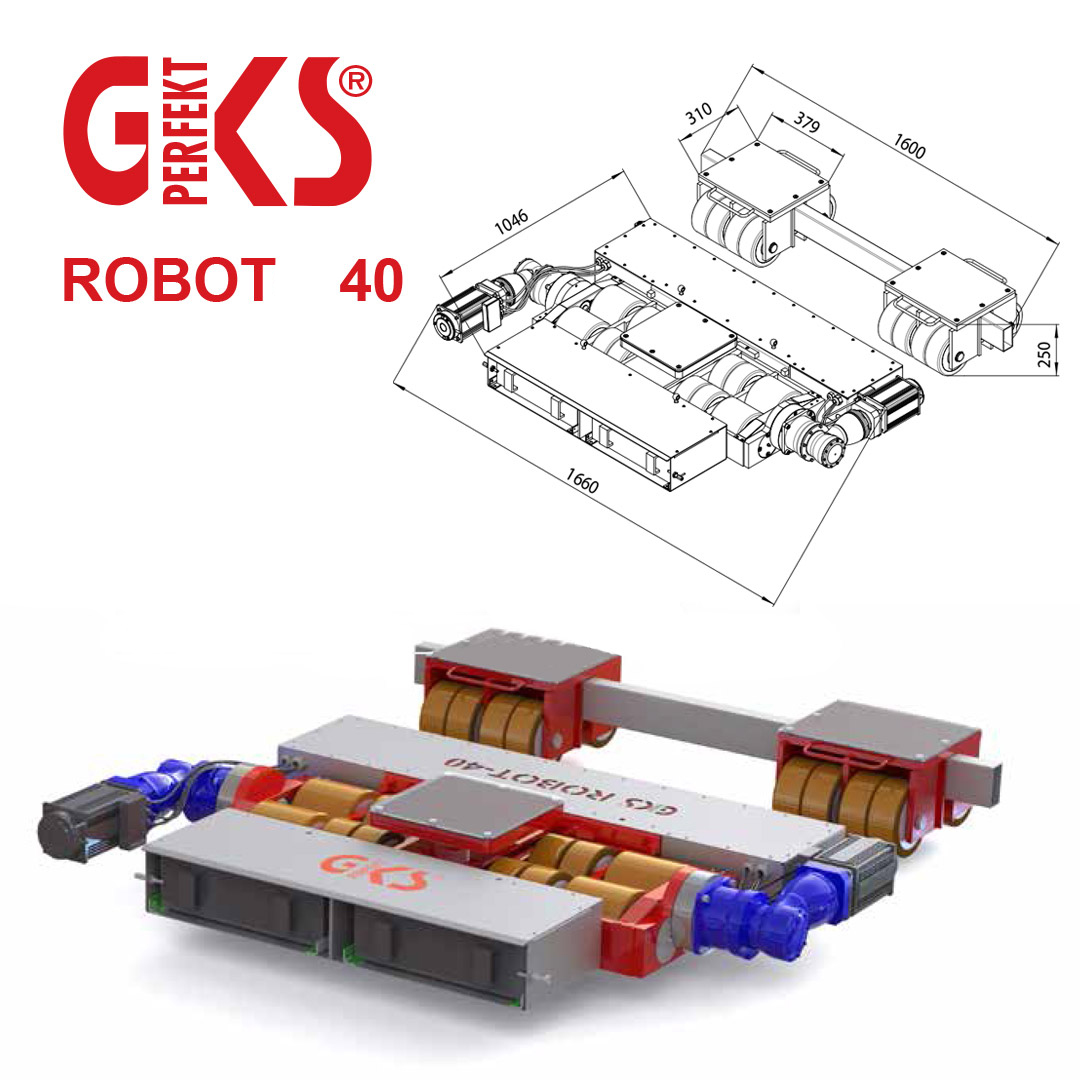
Sistemi a batteria comandabili a distanza ROBOT 40
Per carichi pesanti fino a 40 tonnellate
I sistemi di trasporto motorizzati telecomandati ROBOT 10, ROBOT 20 e ROBOT 40 sono usati soprattutto per la logistica interna, le linee di assemblaggio, la movimentazione e l’installazione di macchinari. Pesi fino a 40 t possono essere movimentati autonomamente.
Dipende sempre dalle singole situazioni concrete ma le batterie possono avere un’autonomia fino a 150 min. Il ROBOT permette sia di guidare e anche di sterzare
contemporaneamente. È assolutamente indipendente da qualsiasi fonte di energia esterna. La massima sicurezza e facilità di trasporto sono garantite dal collaudato sistema di trasporto a 3 punti d’appoggio: uno frontale nel timone motorizzato L-ROBOT e due posteriori nel carrelo di trasporto F .
Dipende sempre dalle singole situazioni concrete ma le batterie possono avere un’autonomia fino a 150 min. Il ROBOT permette sia di guidare e anche di sterzare
contemporaneamente. È assolutamente indipendente da qualsiasi fonte di energia esterna. La massima sicurezza e facilità di trasporto sono garantite dal collaudato sistema di trasporto a 3 punti d’appoggio: uno frontale nel timone motorizzato L-ROBOT e due posteriori nel carrelo di trasporto F .
Caratteristiche:
- L'impiego tramite il trasmettitore del radiocomando avviene mediante due interruttori a levetta per la marcia avanti e la marcia indietro
- La velocità di marcia può essere regolata in modo proporzionale. È possibile ruotare sul posto il L-ROBOT sotto carico. Vengono riconosciuti i disturbi dovuti ad altre frequenze, il comando si disattiva
- Novità: opzione con piatto sollevabile-rotante L-ROBOT-20 (corsa 40 mm)
- Funzione supplementare di sincronismo per una guida rettilinea precisa
- Optional: caricabatteria rapido (4 h), stazione di carica da parete, cassa per il trasporto, set di batterie di ricambio, sollevatore V15 con corsa prolunga-ta (270 mm)
- Portata totale 400 kN (40 t)
Descrizione tecnica | L-ROBOT-20 | F-ROBOT-20 |
|---|---|---|
Codice articolo | 13735 | 13636 |
Azionamento | (24 V / 1,5 kW) | - |
Tipo di batteria | Polimeri Li | - |
Altezza di caricamento/Numero di ruote speciali | 250 mm / 4 + 8 (larghezza 154 + 76 mm) | 250 mm / 16 (larghezza 76 mm) |
Ingombro (lungh. x largh. x alt.) | 1046 x 1660 x 250 mm | - |
Superficie di appoggio | 320 x 320 mm | 310 x 379 mm |
Asta distanziale regolabile | - | 758-1600 mm |
Peso proprio | 460 kg | 140 kg |
Portata | 200 kN (20 t) | 200 kN (20 t) |
Optionals / Punti di forza

Trasmettitore del radiocomando
Tramite un interruttore a levetta è possibile passare dallo sterzo manuale alla guida rettilinea precisa. Quindi attraverso un unico interruttore a levetta è possibile azionare la guida rettilinea in avanti o indietro. Sul display compare un relativo messaggio.
Tramite un interruttore a levetta è possibile passare dallo sterzo manuale alla guida rettilinea precisa. Quindi attraverso un unico interruttore a levetta è possibile azionare la guida rettilinea in avanti o indietro. Sul display compare un relativo messaggio.
Sistema di videocamera per ROBOT 20/40
Il sistema di trasporto ROBOT naturalmente può essere comandato da una persona mediante radiocomando, per esempio per collocare una macchina da 40 tonnellate al posto giusto. Ci sono però delle situazioni in cui è meglio che l'operatore abbia più occhi: a marcia indietro o con carichi estremamente ingombranti. A tale scopo esiste l'opzione videocamera: una videocamera montata sul ROBOT, un sistema di trasmissione per WLAN, trasmettitore, ricevitore e un monitor sul trasmettitore del radiocomando.
Il sistema di trasporto ROBOT naturalmente può essere comandato da una persona mediante radiocomando, per esempio per collocare una macchina da 40 tonnellate al posto giusto. Ci sono però delle situazioni in cui è meglio che l'operatore abbia più occhi: a marcia indietro o con carichi estremamente ingombranti. A tale scopo esiste l'opzione videocamera: una videocamera montata sul ROBOT, un sistema di trasmissione per WLAN, trasmettitore, ricevitore e un monitor sul trasmettitore del radiocomando.